Projects
Real-time State Estimation and Feedback Optimization of Electrical Distribution Grids
The operation of power grids, and especially distribution grids, is undergoing a paradigm shift due to the increasing share of controllable elements (generation power, curtailment, reactive power in converters, flexible loads, etc.), and pervasive sensing (smart meters, phasor measurement units, etc.). Moreover, the introduction of communication networks with high-resolution sensor sampling and the fast response offered by the power electronics interfacing the controllable energy sources enable very fast control-loop rates.
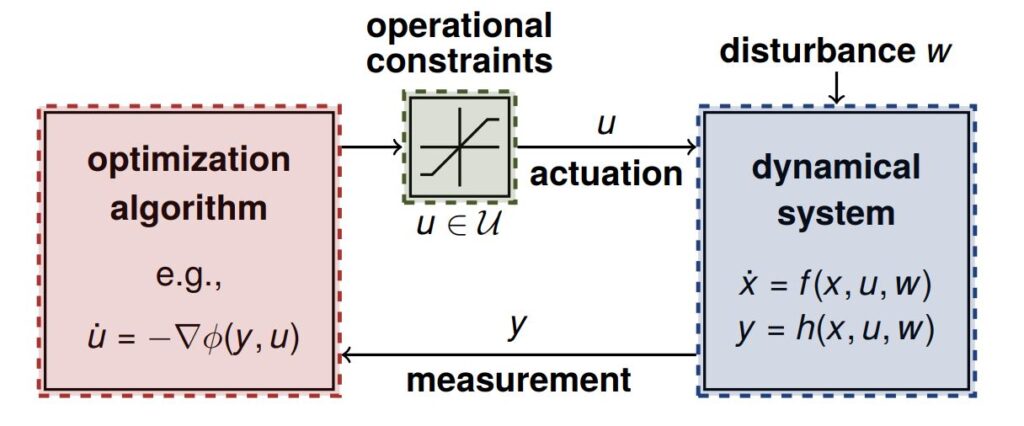
The recently proposed online feedback optimization has shown outstanding performance for real-time power-system operation under variable conditions and safety requirements. This algorithm consists of collecting real-time grid-state measurements at each time step and then using them as feedback to a controller that incrementally drives the controllable power injections towards the power grid optimal set-points. This offers the advantages of quickly adapting to time-varying conditions and an improved robustness against modelling errors.
So far, the online feedback optimization approach considers a stylized problem setup by assuming availability of noise-free measurements of all states that need to be controlled which may potentially be the entire system state. Yet, state measurements may be scarce or affected by noise, especially in distribution grids. Hence, inaccurate a-priori information in the form of load predictions, also known as pseudo-measurements, are employed to estimate the grid state via a state estimation problem.
Our objective is to develop a method that combines state estimation and online feedback optimization, with mathematically proven qualities such as stability and convergence, and a guaranteed robustness against estimation error. This will equip the ReMaP Platform with a real-time control algorithm that can simultaneously monitor and operate the grid.
Please contact Miguel Picallo Cruz and Florian Dörfler for more information.